모터 선정 가이드 — 용도별 모터 선정 방법 및 5단계 체크리스트
기계 사양 설계를 하다보면 모터 선정이 쉬운 것 같으면서도 고민이 되는 때가 많습니다.
사실 서보모터를 쓰면 정확하고 빠르지만 단순 컨베이어에 서보를 달면 비용이 5~10배 올라갑니다. 반대로 빠른 가감속이 필요한 픽&플레이스 장비에 유도 전동기를 붙이면 정확한 위치 조정이 안되서 문제가 됩니다.
이 글에서는 어떤 용도에 어떤 모터를 고를지, 그 판단 기준과 실제 계산 과정을 단계별로 정리했습니다.
이 글에서 다루는 내용: ① 토크·출력 계산 공식과 수치 예시(컨베이어·볼스크류), ② 관성비 계산과 감속기 선정, ③ 용도별 모터 종류 판단 트리, ④ 발행 전 5단계 체크리스트. 처음 모터를 선정하는 분도, 기존 설비 트러블을 해결하려는 분도 해당 글이 모터 선정에 도움이 되었으면 좋겠습니다.

모터 선정 전 반드시 확인할 4가지 운전 조건
모터를 고르기 전에 먼저 설비가 무엇을 요구하는지 명확히 해야 합니다. 공식을 쓰기 전에 이 4가지를 먼저 정리하세요.
① 부하의 특성 — 어떤 힘이 필요한가
정토크 부하 — 컨베이어, 이송 스크류: 속도와 관계없이 토크 거의 일정
2승 저감 토크 부하 — 펌프, 팬, 블로어: 토크 ∝ 속도² → 인버터 절전 효과 극대
정출력 부하 — 권취기, 와인더: 속도가 올라갈수록 토크 감소
충격 부하 — 프레스, 압연기: 순간 피크 토크가 정격의 3~10배
- 펌프·팬에는 인버터+유도 전동기 조합이 가장 효율적입니다. 유량을 절반으로 줄이면 소비 전력이 1/8로 떨어집니다.
- 충격 부하 설비는 플라이휠이나 감속기를 추가해 순간 토크를 완충하거나, 피크 토크 여유율이 큰 모터를 선택해야 합니다.
② 운전 패턴 — 어떻게 움직이는가
| 패턴 | 특징 | 고려 사항 |
|---|---|---|
| 연속 운전 | 24시간 정속 회전 | 정격 토크 이하 사용, 발열 관리 |
| 단속 운전 | 기동·정지 반복 | 실효(RMS) 토크로 용량 선정 |
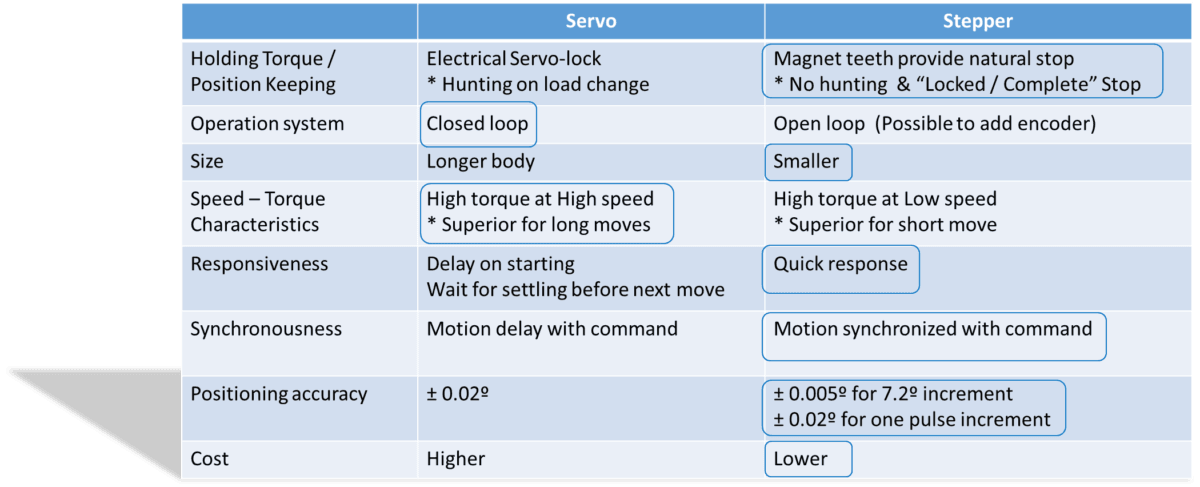
| 위치 결정 반복 | 이동 → 정지 → 다시 이동 | 가감속 토크 계산 필수, 서보·스테퍼 검토 |
| 고빈도 기동 | 1분에 수십 회 ON/OFF | 과열 주의 — 서보나 인버터 구동 검토 |
③ 정밀도 요구 수준
- 위치 반복 정도 ±0.1mm 이상 허용: 유도 전동기 + 인버터 또는 스테퍼로 충분
- ±0.01mm 이하 고정밀: 서보 모터 필수 (고분해능 인코더 조합)
- 연속 속도 제어 (정밀 불요): 인버터 + 유도 전동기가 가장 경제적
④ 환경 조건
- 분진·수분 환경: IP65 이상 모터 → 방수·방진 규격 확인 필수
- 폭발 위험 구역: 방폭(Ex) 모터 — IEC/KS 규격 별도 적용
- 저온(-20°C 이하): 저온용 그리스, 절연 등급 F 이상 선택
- 고온(주변 40°C 초과): 정격 출력을 5~10% 감용
모터 선정 ① 토크와 출력 계산 — 핵심 공식과 실전 예시
모터 선정의 첫 번째 관문은 필요한 토크와 출력을 계산하는 것입니다. 이걸 틀리면 모터가 너무 작아서 못 돌거나, 불필요하게 크게 골라 비용이 올라갑니다.
기본 토크·출력 공식
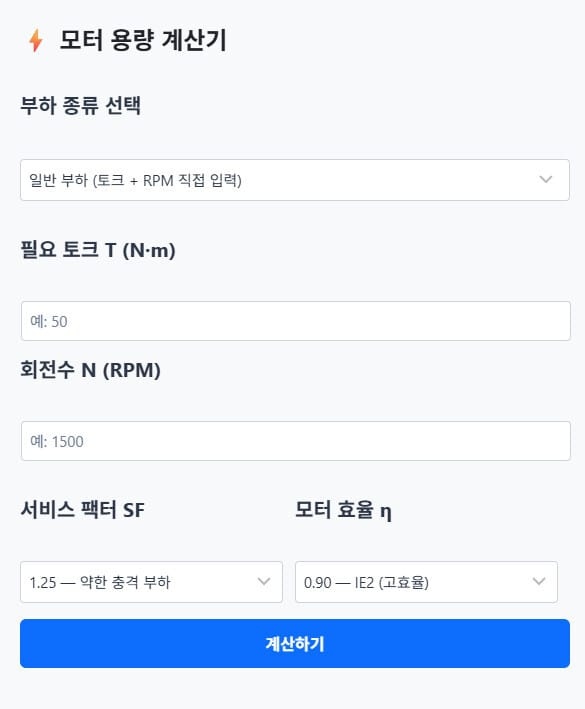
① 출력 P (kW) = T × ω = T × (2π × N / 60)
T = 토크(Nm), N = 회전속도(rpm)
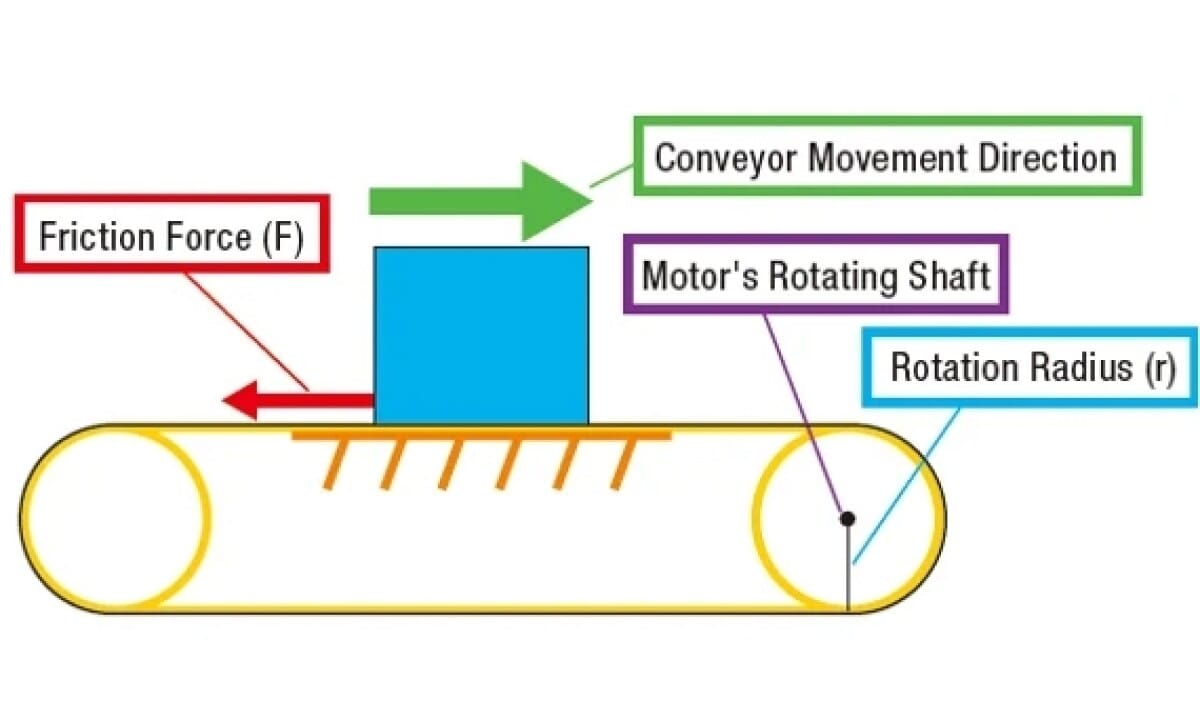
② 컨베이어 이송 토크 T (Nm) = F × r
F = 부하력(N) = m × g × μ, r = 롤러 반경(m)
③ 가감속 토크 Ta (Nm) = J × α = J × (ΔN × 2π) / (60 × t)
J = 관성 모멘트(kg·m²), t = 가감속 시간(s)
실전 계산 예시 — 수평 컨베이어
① 이송력 F = 200 × 9.8 × 0.1 = 196 N
② 이송 토크 T = 196 × 0.05 = 9.8 Nm
③ 롤러 회전속도 N = (0.5 / (π × 0.1)) × 60 ≒ 95 rpm
④ 필요 출력 P = 9.8 × (2π × 95/60) ≒ 0.097 kW
→ 0.1kW(100W) 모터 선정, 여유율 1.2 적용 시 0.12kW → 0.2kW 규격 선택
계산값 그대로 선정하면 기동 토크 부족, 전압 강하 시 트립 등 문제가 생깁니다.
일반 기계: ×1.2~1.5 / 충격 부하: ×2.0 이상
단속 운전 — 실효(RMS) 토크 계산
기동·정지를 반복하는 단속 운전에서는 단순 최대 토크가 아닌 실효 토크(T_rms)로 모터 용량을 결정해야 합니다. 피크가 높아도 운전 시간이 짧으면 발열이 적기 때문입니다.
T₁=가속 토크, t₁=가속 시간 / T₂=정속 토크, t₂=정속 시간 / T₃=감속 토크, t₃=감속 시간 / t₄=정지 시간
→ T_rms ≤ 모터 정격 토크 조건을 만족해야 합니다
가속: T₁ = 15Nm × t₁ = 2s | 정속: T₂ = 5Nm × t₂ = 3s | 감속: T₃ = 10Nm × t₃ = 2s | 정지: t₄ = 1s
T_rms = √[(15² × 2 + 5² × 3 + 10² × 2) / (2 + 3 + 2 + 1)]
= √[(450 + 75 + 200) / 8]
= √[725 / 8]
= √90.6 ≒ 9.5Nm
→ 피크 토크는 15Nm이지만 모터 정격 토크는 9.5Nm 이상이면 충분합니다. 10Nm 정격 모터로 선정 가능.
모터 선정 ② 관성비 계산 — 서보·스테퍼 선정의 핵심
서보 모터나 스테퍼 모터를 선정할 때 토크만큼 중요한 것이 관성비(Inertia Ratio)입니다. 관성비가 너무 높으면 서보가 진동하거나 오버슈트가 커져서 정밀한 위치 결정이 안 됩니다. 현장에서 “서보가 흔들린다”는 문제의 절반 이상이 관성비 문제입니다.
관성비 계산 공식
JL = 부하 관성 모멘트(kg·m²), JM = 모터 자체 관성(카탈로그 값)
원통형 부하: JL = ½ × m × r²
원반(디스크): JL = ½ × m × r²
직선 이동 부하(볼스크류): JL = m × (lead / 2π)²
허용 기준:
일반 서보: JL/JM ≤ 5배
고응답 서보(반도체·LCD): JL/JM ≤ 3배
스테퍼: JL/JM ≤ 10배
관성비 초과 시 해결 방법
| 방법 | 효과 | 비용/복잡도 |
|---|---|---|
| 감속기 추가 | 감속비 n:1 → 부하 관성 1/n² 감소 | 중간 — 가장 효과적 |
| 더 큰 모터 선택 | JM 증가 → 비율 감소 | 높음 — 단순하지만 비용 상승 |
| 부하 경량화 | JL 직접 감소 | 설계 변경 필요 |
| 게인 튜닝 하향 | 진동 억제 (응답성 희생) | 낮음 — 임시 처방 |
볼스크류 이송 장치 관성 계산 예시
부하 관성 JL = m × (lead / 2π)² = 10 × (0.005 / 6.283)² = 10 × (7.96×10⁻⁴)² ≒ 6.33×10⁻⁶ kg·m²
예시 서보 모터 JM = 1.77×10⁻⁵ kg·m² (100W급 일반적 값)
관성비 = 6.33×10⁻⁶ / 1.77×10⁻⁵ ≒ 0.36배 → 매우 양호
→ 리드가 작을수록 (lead / 2π)²가 작아져 관성비에 유리합니다. 단, 리드가 작으면 이송 속도도 느려지므로 속도와 관성비를 함께 검토해야 합니다.
관성비 20배짜리 부하에 1:5 감속기를 달면 → 20 ÷ 25 = 0.8배로 단번에 해결됩니다.
용도별 모터 종류 선택 기준 — 판단 트리
이론 계산이 끝났다면 이제 어떤 종류의 모터를 쓸지 결정할 차례입니다. 아래 판단 트리를 순서대로 따라가면 대부분의 상황에서 올바른 방향을 잡을 수 있습니다.
모터 선정 판단 기준 요약표
| 판단 질문 | YES → 이 모터 | NO → 다음 단계 |
|---|---|---|
| 정밀 위치 결정(±0.01mm 이하)이 필요한가? | 서보 모터 | 다음 질문으로 |
| 인코더 없이 펄스로 위치를 제어해도 되는가? | 스테퍼 모터 (500rpm 이하, 저부하) | 다음 질문으로 |
| 속도 제어가 필요하고 위치 정밀도는 낮아도 되는가? | 인버터 + 유도 전동기 (펌프·팬·컨베이어) | 다음 질문으로 |
| 고정속 단순 회전이고 비용이 최우선인가? | 유도 전동기 (직입 기동) | — |
| 소형 기기·이동형 장치이고 DC 전원을 쓰는가? | BLDC 또는 DC 브러시 모터 | — |
용도별 추천 모터 정리
| 용도 | 추천 모터 | 이유 |
|---|---|---|
| 컨베이어, 펌프, 팬 | 유도 전동기 + 인버터 | 저렴·내구성·절전 효과 극대 |
| 로봇 암, 픽&플레이스 | 서보 모터 | 고속·고정밀 위치 결정 필수 |
| 3D 프린터, 소형 CNC | 스테퍼 모터 | 저속 정밀, 저비용 구현 |
| 전동 공구, 드론 모터 | BLDC 모터 | 소형·경량·고rpm·긴 수명 |
| 프레스, 권취기(와인더) | 서보 모터 (토크 제어) | 장력·토크 정밀 제어 필요 |
| 에어 컴프레서, 믹서 | 유도 전동기 (직입) | 고정속, 내구성, 최저 비용 |
| AGV, 자율 이동 로봇 | BLDC + 서보 혼용 | 주행=BLDC, 암=서보로 분리 |
모터 선정 5단계 체크리스트
현장에서 직접 써먹는 체크리스트입니다. 이 순서대로 따라가면 어지간한 실수는 걸러낼 수 있습니다.
☐ 부하 종류 확인 (정토크·2승 저감·정출력·충격)
☐ 필요 토크 계산 (이송력 × 반경 or F × r)
☐ 운전 속도 범위 확정 (최소·정격·최대 rpm)
☐ 운전 패턴 확인 (연속·단속·위치결정 반복)
☐ 위치 정밀도 요구 수준 → 서보·스테퍼·유도 전동기 분기
☐ 전원 조건 (3상 AC / 단상 AC / DC)
☐ 설치 환경 (IP 등급, 온도, 방폭 여부)
☐ 정속 토크 계산 후 여유율 1.2~1.5 적용
☐ 가감속 토크 계산 (J × α)
☐ 단속 운전이면 실효(RMS) 토크 계산
☐ 계산 토크 × 여유율 ≤ 모터 정격 토크 확인
☐ 부하 관성 JL 계산 (모양별 공식 적용)
☐ 모터 카탈로그에서 JM 확인
☐ JL/JM ≤ 5배 (서보) / 10배 (스테퍼) 확인
☐ 초과 시 감속기 추가 또는 상위 용량으로 변경
☐ 드라이버·인버터 용량 확인 (모터 정격 전류의 1.0~1.1배 인버터 선택 — 예: 0.75kW 모터 → 0.75kW 또는 1.5kW 인버터, 빈번한 기동·정지 시 한 등급 위 권장)
☐ 전원 용량 및 배선 굵기 확인
☐ 제동 저항 필요 여부 (수직 이송·회생 제동)
☐ 기동 전류 서지로 인한 보호 회로 확인
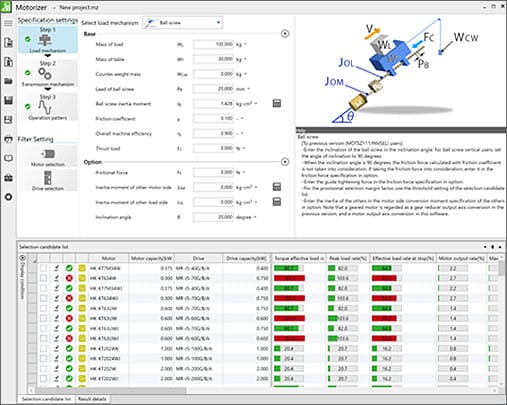
☐ 제조사 선정 툴(Motorizer 등)로 최종 검증

제조사별 선정 도구 및 실무 팁
계산이 맞았는지 최종 확인하는 가장 빠른 방법은 제조사 선정 툴을 활용하는 것입니다. 무료로 제공되며 계산 결과를 PDF로 출력해 사양서에 첨부할 수도 있습니다.
주요 제조사 선정 툴
| 제조사 | 툴 이름 | 특징 | 접속 방법 |
|---|---|---|---|
| 미쓰비시 전기 | Motorizer | MR-J4·MR-J5 서보 전용. 기계 구성 입력 → 자동 용량 계산 | kr.mitsubishielectric.com |
| LS ELECTRIC | iMC 선정 툴 | 서보·인버터 통합. 한국어 지원 우수 | ls-electric.com |
| 오리엔탈모터 | Oriental Motor 선정 가이드 | 스테퍼·BLDC 중소형 특화 | orientalmotor.co.kr |
| 닛세이 | 계산 선정 툴 | 기어드 모터 특화, 감속비까지 자동 계산 | sentei.nissei-gtr.co.jp/korea |
실무에서 자주 놓치는 3가지
- 전압 강하 시 기동 토크 부족: 전압이 10% 낮아지면 토크는 약 19% 감소합니다. 말단 부하라면 전압 강하를 미리 반영해 모터를 한 등급 크게 선택하세요.
- 수직 이송 제동 저항 누락: 수직 승강 설비는 하강 시 모터가 발전기 역할(회생)을 합니다. 제동 저항이 없으면 인버터 과전압 트립이 발생합니다.
- 모터 입력 허용 주파수 범위: 서보를 최고 속도 근처에서 연속 운전하면 과열됩니다. 정격의 80% 이하에서 상시 운전하도록 여유를 두세요.
관련 내용: 모터의 원리 — AC·DC·서보·스테퍼 종류 및 작동 원리
외부 링크: 미쓰비시 Motorizer 서보 용량 선정 툴
자주 묻는 질문 & 트러블슈팅 FAQ
- Q. 모터 용량 선정 시 여유율을 얼마나 줘야 하나요?
- 일반 기계는 계산 토크의 1.2~1.5배가 기본입니다. 충격 부하(프레스, 컨베이어 기동)나 빈번한 기동·정지 반복 설비는 2배 이상을 권장합니다. 여유율을 너무 크게 잡으면 역률·효율이 떨어지므로 표준 규격 중 가장 가까운 상위 값을 고르면 됩니다.
- Q. 서보 모터인데 진동이 잡히지 않습니다. 어디서 시작해야 하나요?
- 먼저 관성비를 확인하세요. 관성비가 5배를 넘는다면 게인을 아무리 조정해도 진동이 잡히기 어렵습니다. 감속기 추가 또는 상위 용량 모터로 교체가 근본 해결책입니다. 관성비가 정상이라면 가속 시간을 20~30% 늘려보고, 그래도 안 되면 제조사 드라이버의 오토 튜닝 기능을 활용하세요.
- Q. 스테퍼 모터를 쓰다가 서보로 바꿔야 할 시점은 언제인가요?
- 다음 중 하나라도 해당되면 서보 전환을 검토하세요: ① 탈조가 반복 발생 ② 500rpm 이상 고속 필요 ③ 위치 정밀도 ±0.05mm 이하 요구 ④ 토크 부족으로 용량을 계속 올려야 하는 상황. 스테퍼의 단가 이점은 이런 상황에서는 사라집니다.
- Q. 인버터 없이 유도 전동기를 기동하면 어떻게 되나요?
- 직입 기동 시 기동 전류가 정격의 5~8배 흐릅니다. 작은 설비에서는 크게 문제 없지만, 22kW 이상 대용량 모터는 전압 강하로 다른 설비에 영향을 줄 수 있습니다. Y-Δ 기동, 소프트 스타터, 또는 인버터 기동을 검토하세요.
- Q. 감속기가 달린 모터 선정 시 토크 계산은 어떻게 하나요?
- 모터 출력 토크 × 감속비 × 기어 효율(보통 0.9~0.95) = 출력 토크입니다. 예를 들어 1Nm 모터 + 1:10 감속기(효율 0.9) → 출력 토크 9Nm. 단, 속도는 반대로 1/10로 줄어듭니다. 토크는 많이 필요하지만 속도는 낮아도 되는 설비에 적합합니다.
본 글은 일반적인 기술 정보 제공을 목적으로 작성되었으며, 실제 설계 및 시공 시에는 반드시 자격을 갖춘 전문가와 상담하시기 바랍니다. 현장 조건과 법규에 따라 적용 방법이 달라질 수 있습니다.